I had a few issues with the current way Sparky was built. Mainly the the fact that the power bank did nearly not fit and had the motor axis sometimes grind against the hull of the power bank. That is obviously quite a flaw – especially since that also impaired Spary’s movement sometimes. I decided I wanted to get a fixed battery pack, inspired by other creators in the LetsRobot community.
And while I were at it, I wanted to have a better speaker setup.
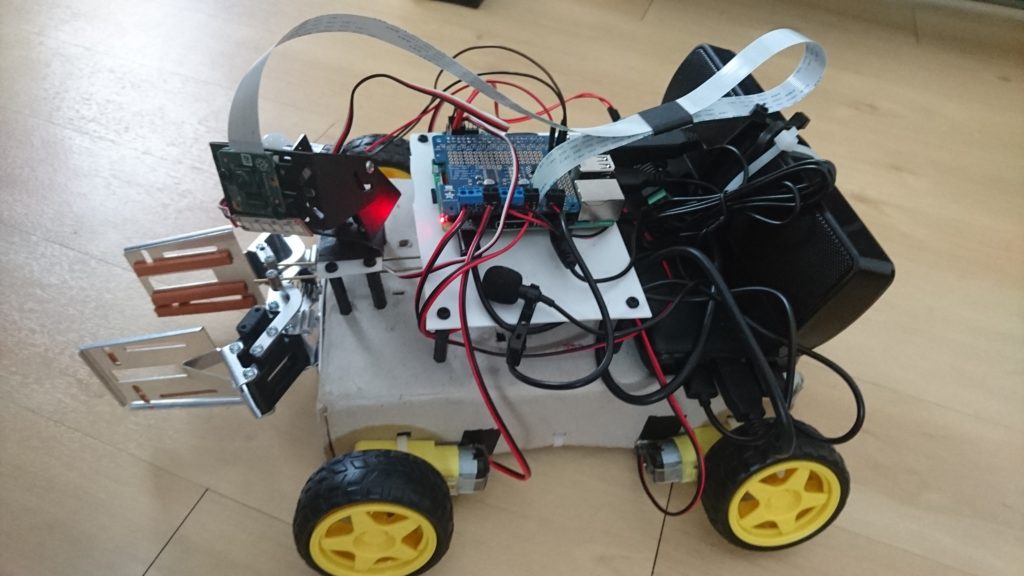
Here a before/after comparison:
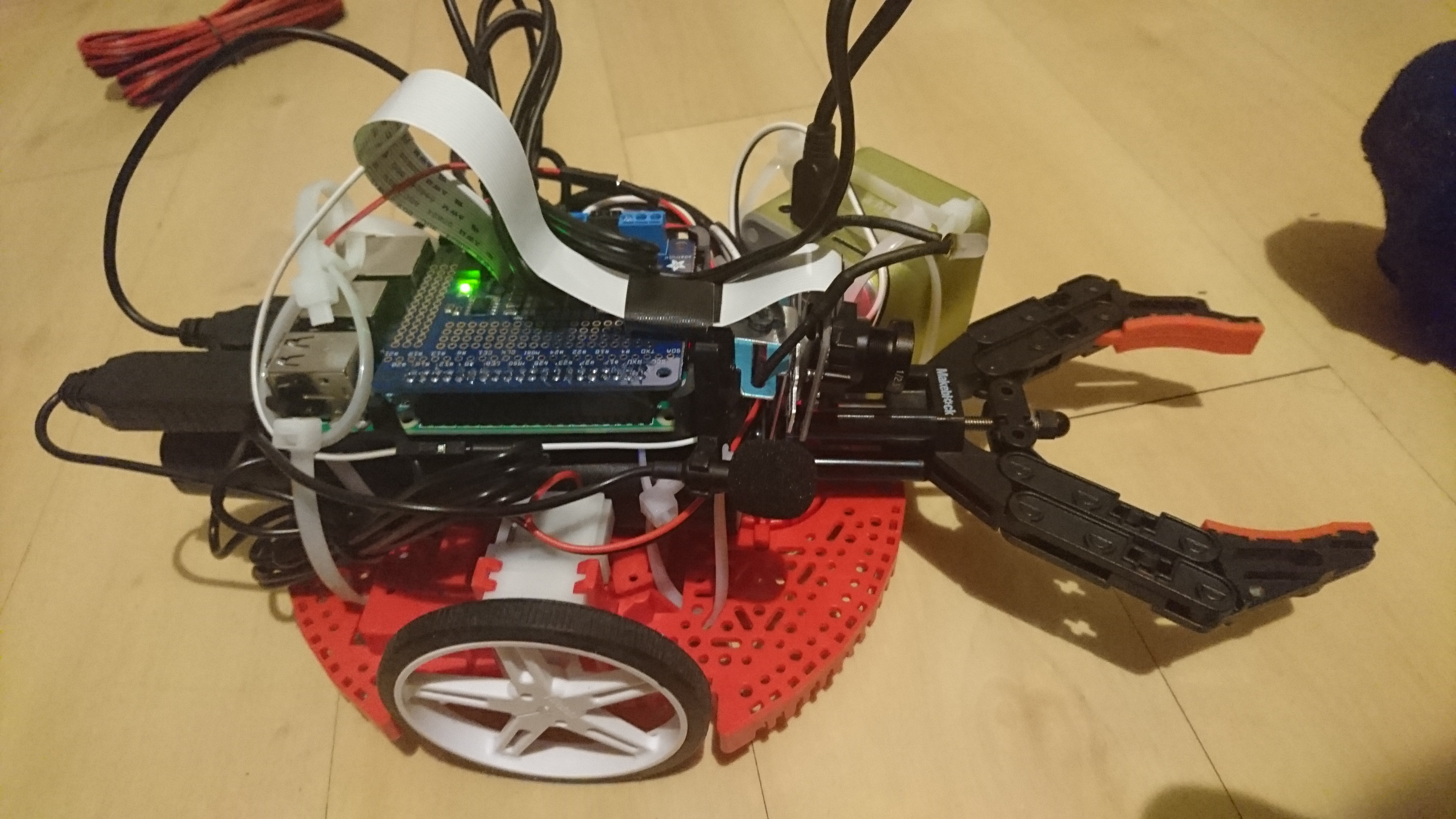
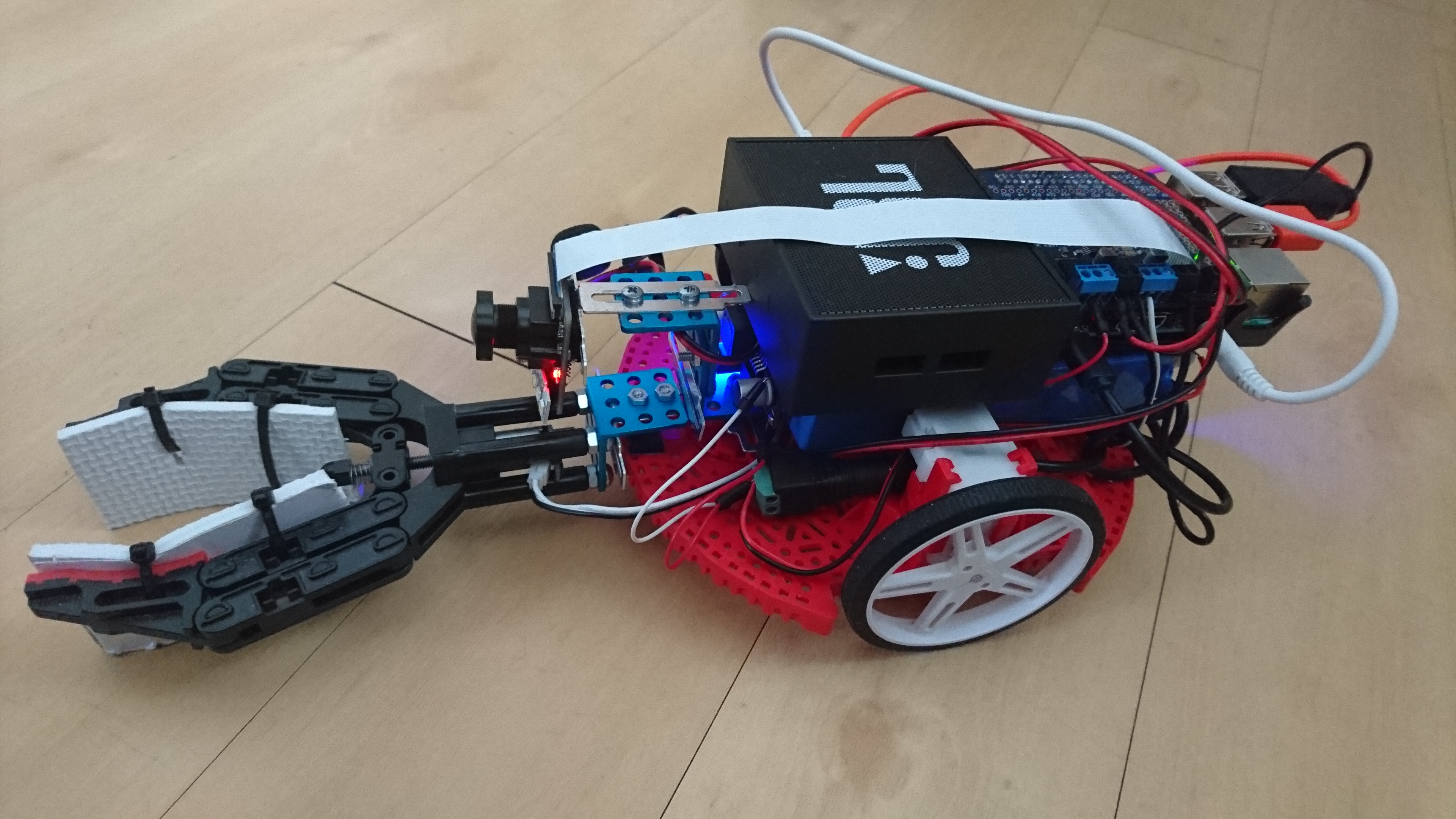
It should be quite obvious that the new revision is now more pleasant to look at. Also the big speaker block could be fit behind the camera and centered, which also improved driving straight. The gripper got the pads to reach all the way to the floor. (I later trimmed the front edges of those so they wouldn’t get caught up on ledges as often) The battery has been replaced with a Li-Ion pack that outputs 12V. With this addition I used two step down converters, but gained the ability to have components that required over 5V – also charging and switching the robot off got way easier.
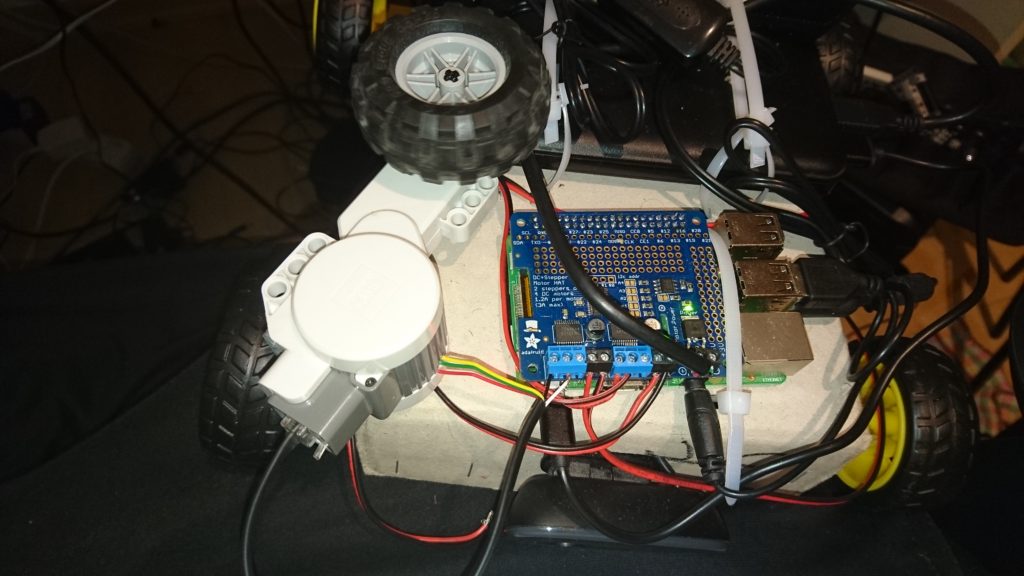
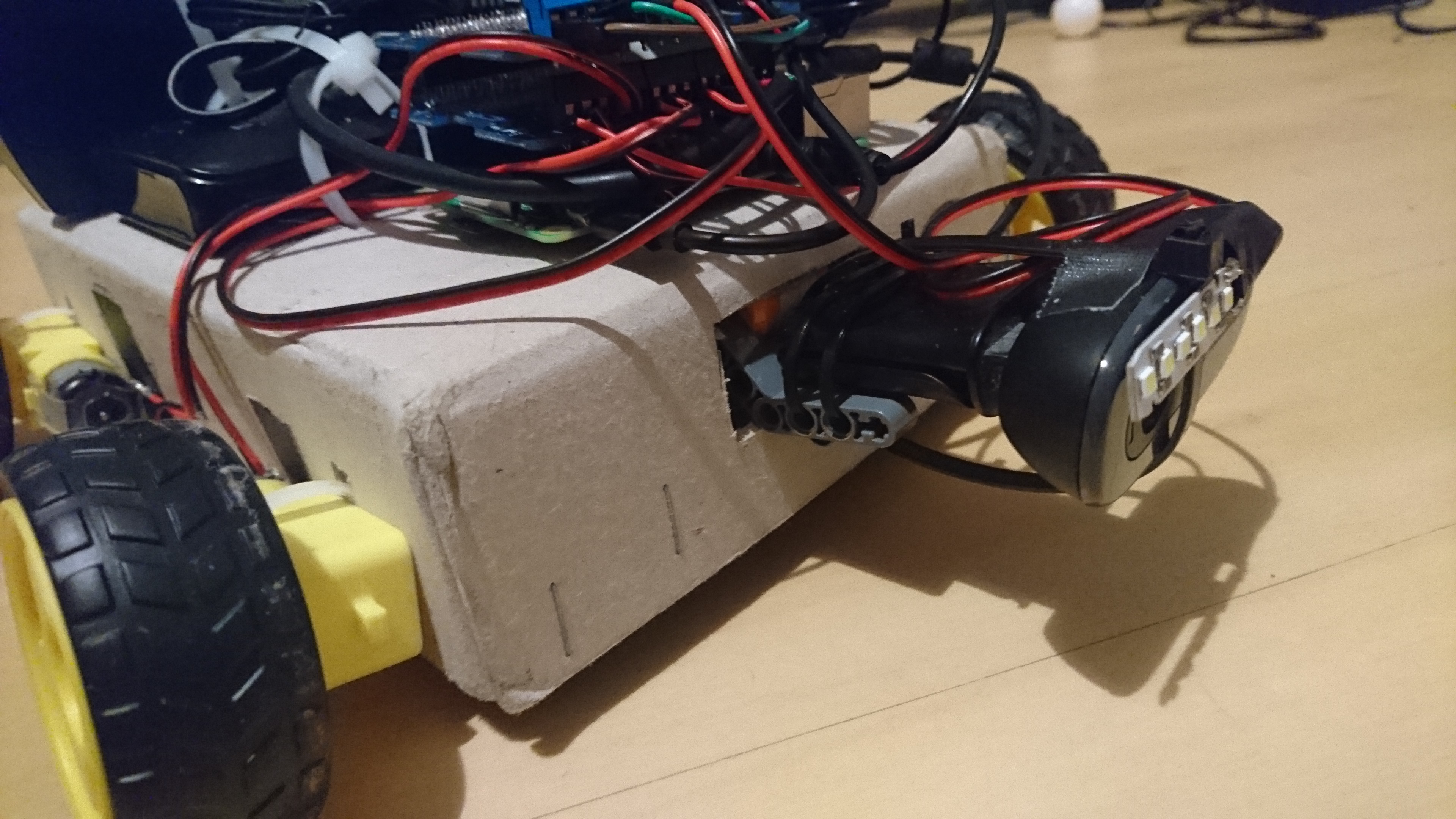
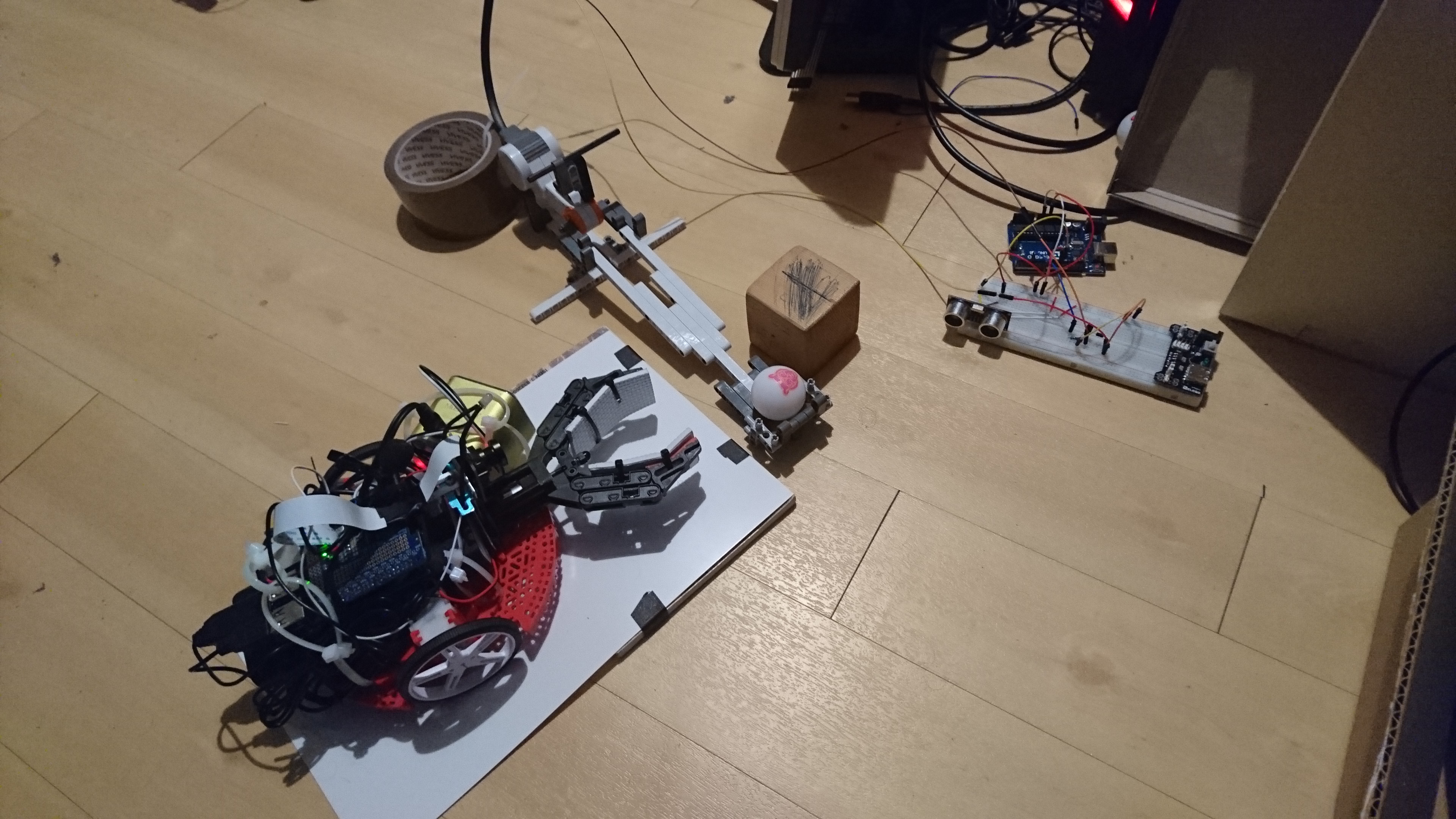
Here a gallery with more angles and steps.