Here a small collection of videos of my robtos doing stuff. I thought I need a few videos to show how they actually perform in action – but I realized that I didn’t really film them often…
Category: Sparky
Sparky rewamp (V2)
I had a few issues with the current way Sparky was built. Mainly the the fact that the power bank did nearly not fit and had the motor axis sometimes grind against the hull of the power bank. That is obviously quite a flaw – especially since that also impaired Spary’s movement sometimes. I decided I wanted to get a fixed battery pack, inspired by other creators in the LetsRobot community.
And while I were at it, I wanted to have a better speaker setup.
Here a before/after comparison:
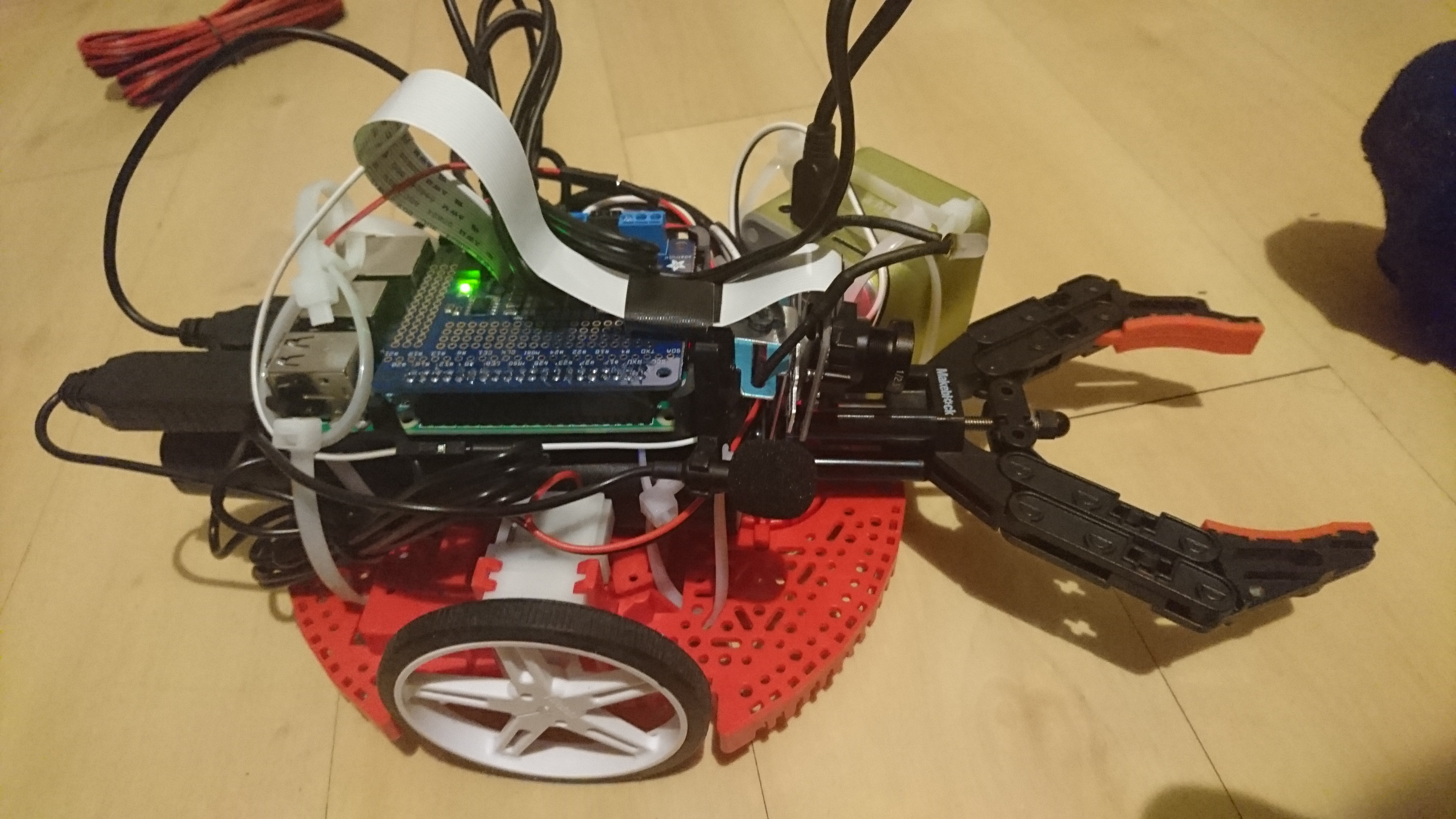
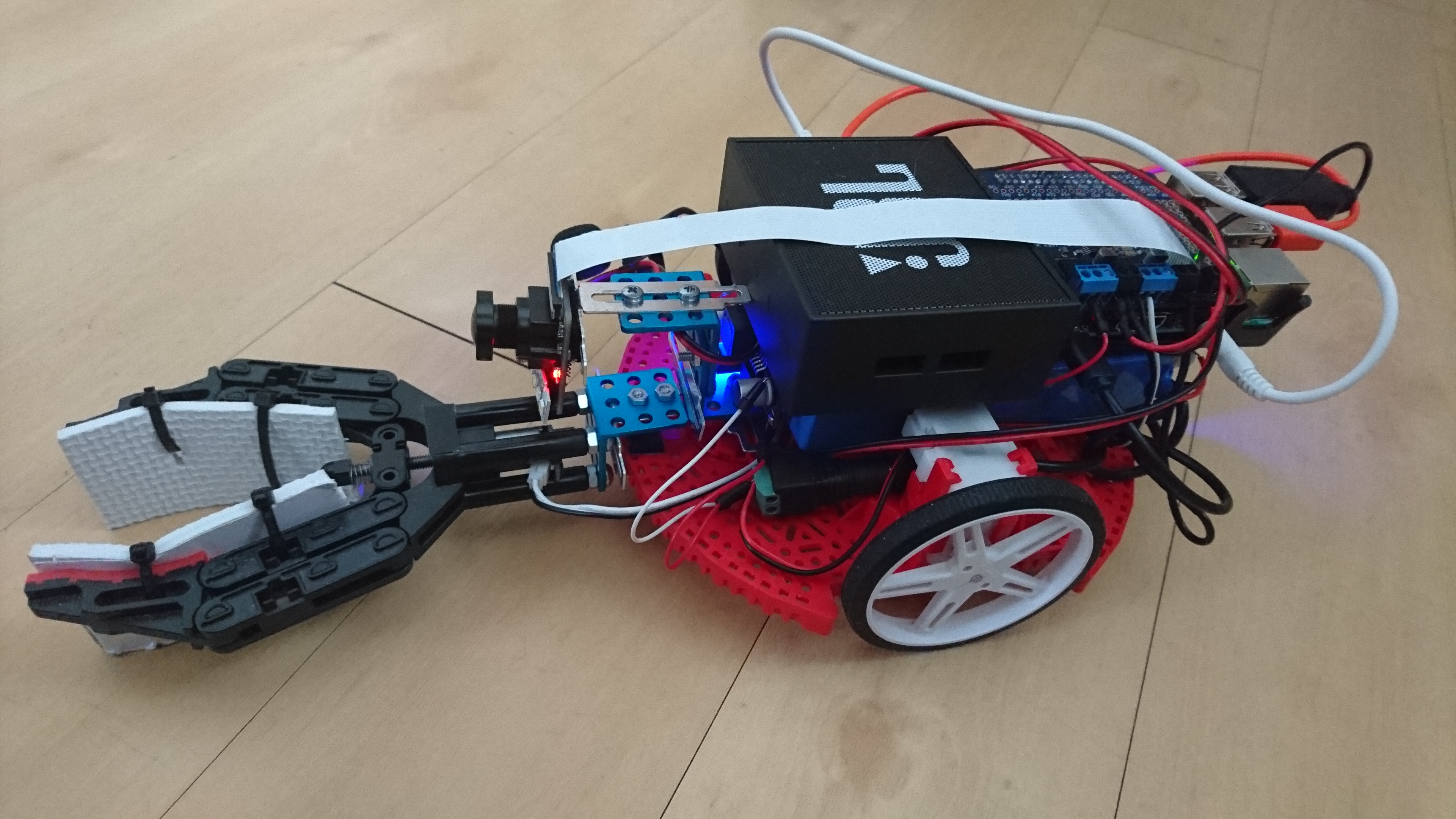
It should be quite obvious that the new revision is now more pleasant to look at. Also the big speaker block could be fit behind the camera and centered, which also improved driving straight. The gripper got the pads to reach all the way to the floor. (I later trimmed the front edges of those so they wouldn’t get caught up on ledges as often) The battery has been replaced with a Li-Ion pack that outputs 12V. With this addition I used two step down converters, but gained the ability to have components that required over 5V – also charging and switching the robot off got way easier.
Here a gallery with more angles and steps.
Catapult for Sparky
In effort to make interactive “Toys” for my robots I created with a catapult built for my LEGO Mindstorms robot back in the day.
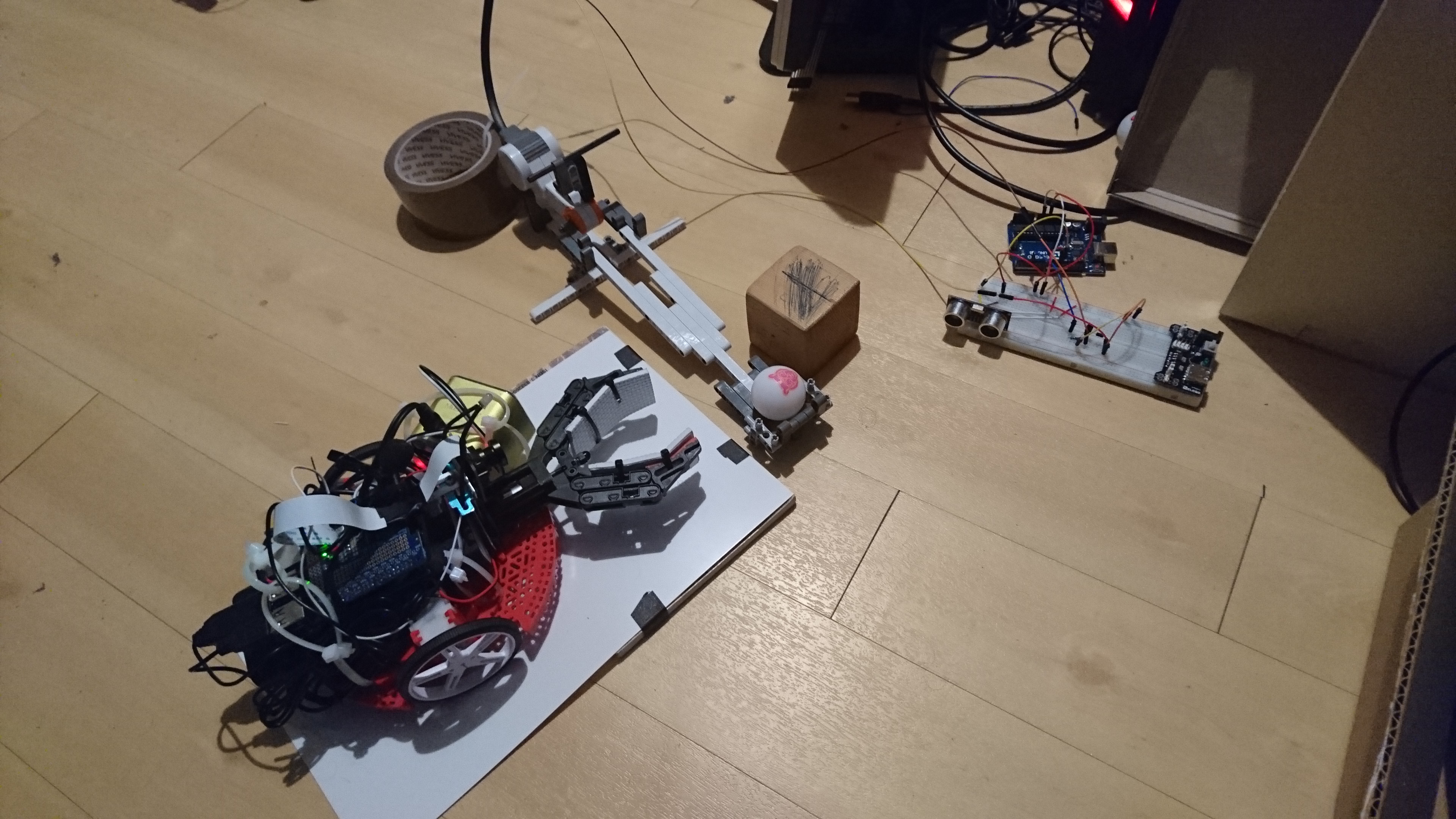
I used a LEGO DC motor with the cable I prepared for Cardbot initially, and used a role of tape to weight down the base of the contraption. On the Breadboard I used an ultrasonic distance sensor to enable the robot to shoot the catapult. The logic is handled by the arduino and the simple H bridge to power the DC motor externally to protect the arduino.
Here a small video of it in action:
Sparky’s first big adventure
The first time I had sparky online for a longer time together with Cardbot, you can imagine people would be up for shenanigans really quickly.
After around 3 hours of being online Sparky used his claw powers to get as much objects under my bed as he could. This is the result:

Sparky
Cardbot felt quite lonely, so I wanted to create a little sibling for him. 🙂 Jokes aside I thought it would be cool to iterate on the single robot on have a second one so they can interact with eachother.
And this time I wanted to opt for a more compact design for better mobility and also add a gripper. I also ordered a fisheye lens for my Raspberry Pi for a bigger viewing angle.
The little headlight LED I added reminded me of an Anglerfish as well – I thought it was cute. But it is actually really useful to navigate the bot in the dark, with the added bonus to be able to turn it off. All in all this bot has better suited components than Cardbot and is more well rounded (pun may or not be intended).