The university I was a student at has a bunch of Turtlebot3 for student projects. And they got upgraded with a Jetson nano instead of the stock Raspberry Pi it had originally. After one student project on the new platform, it was clear that the Jetson nanos were good for calculating AI stuff, but terrible for reliability. So there was a plan to bring back the Raspberry Pis, but also keep the Jetson Nanos.
This was the initial rebuild:

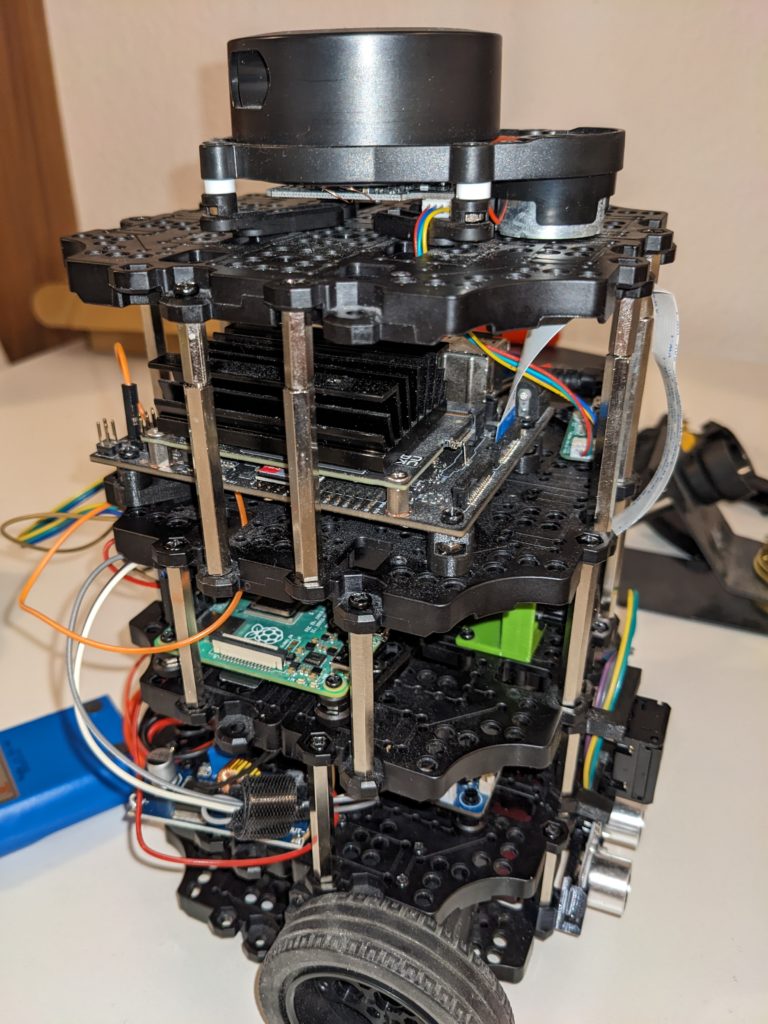
This setup now has:
– two motors
– the OpenCR Board 1.0 for motor and battery control
– A Raspberry Pi 4 4gb as the Robot brain with Ubuntu 22.04 and ROS Humble
– A Jetson Nano for AI and Image operations
– Various sensors (ultrasonic, button, fisheye camera, 2d lidar, imu)
This prototype later got specific instructions what to screw in where, and short enough cables so they could be managed inside the robot. Another caveat that later popped up was that the power cables for the jetson nano were too thin, so a brown out occurred on power spikes. This was remedied by using the original barrel jack cables cut open and soldered in the place of the cables.
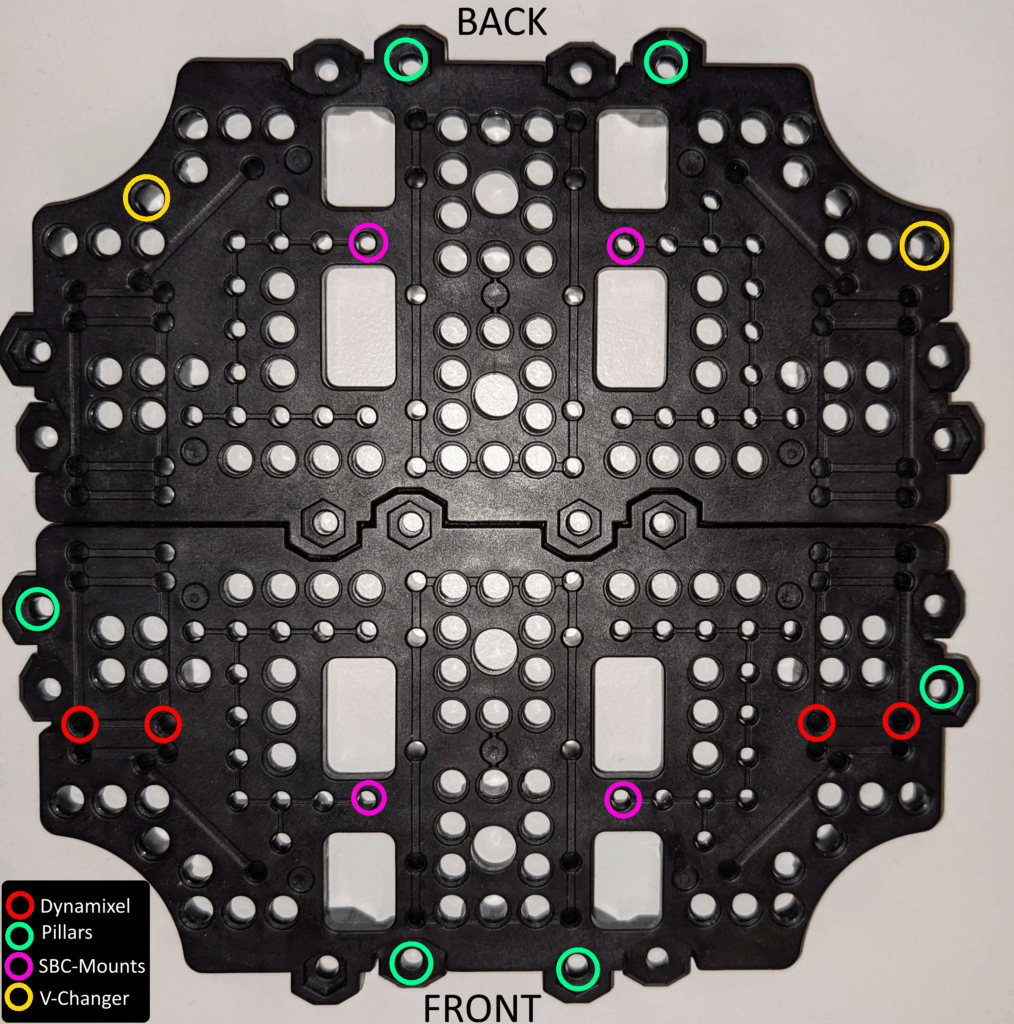
Here an example of the build instructions: